
The actuator
Using electro-magnets for driving strings in musical instrument si not new, dating back to 1886 when Eisenmann@^van2017between built a piano sustainer using such magnets.
Many other augmented instruments have used the electromagnet to induce or control vibrations in strings or other magnetic objects : the Electromagnetically Prepared Piano@^Berdahl2005, the Magnetic Resonator Piano@^McPherson2010 or the EMvibe@^Britt2012, the Vo-96 ; numerous electric guitar sustainers exist on the market, including the E-Bow@^heet1978hand and the Wond.
The decision to use this type of actuators was a defining choice for the instrument, made before the research actually began.
General principle
The physics of this type of actuators is ruled by the Maxwell equations in matter, the response curves of ferromagnetic materials and Faraday's law (which are consequences of Maxwell equations). A typical electro-magnet consists of a coil of copper wire insulated by a thin coat of resin. In the middle of the coil is usually an iron cylindrical core which can guide the magnetic field when a current is injected in the coil. Injecting a current in the coil creates a magnetic field which magnetises the ferromagnetic string above it. The string, having now a magnetic moment, experiences a force due to the magnetic field gradient, pulling it towards the electromagnet.
The shape of the electromagnet is dictated by the desired number of wire turns \(N\) in the coil, the thickness of the wire and the diameter or height of the assembly. Increasing the thickness of the wire decreases linear resistance and makes the coil less sensitive to insulation melting failure; at constant volume, \(N\) is of course reduced, decreasing the DC field intensity.
A. McPherson provides a very convenient guide@^McPherson2012 for choosing the right electro-magnet for augmented instruments, using his Magnetic Resonator Piano as a reference.
A first optimization
Let \(d_{out}\) , \(d_{in}\),\(h\), \(d_{wire}\), \(\rho\) be respectively the outside diameter of the coil, the inside diameter of the coil, the height of the coil, the diameter of the wire and its resistivity (we will neglect the extra thickness due to the insulation around the wire).
As pointed by McPherson, we need to have a high \(NI\) product to get a high intensity field.
Our constraints are the geometry of the electromagnet and the capabilities of our amplifier : both the current \(I\) and the voltage \(U\) are limited (hence, \(I<I_0\) and \(U<U_0\)).
Working first in DC current, we can write Ohm's law \(U = RI\). We can write \(R\) as a function of the parameters :
The number of turns is \(N = \frac{(d_{out}-d_{in})}{2d_{wire}}\frac{h}{d_{wire}}\) and the average circumference is \(\pi \frac{d_{out} + d_{in}}{2}\), so the total length is \(l = \frac{(d_{out}^2-d_{in}^2)\pi h}{4d_{wire}^2}\). The resistance is therefore \(R = \frac{(d_{out}^2-d_{in}^2)\pi h}{4d_{wire}^2}\frac{4\rho}{\pi d_{wire}^2} = \frac{(d_{out}^2-d_{in}^2) h\rho}{d_{wire}^4}\).
At \(U=U_0\), we want \(I = U_0/R \leq I_0\) which means \(\frac{U_0d_{wire}^4}{(d_{out}^2-d_{in}^2) h\rho}\leq I_0\). With a given geometry (hence \(d_{out} , d_{in},h\) are fixed), we get an upper bound for \(d_{wire}\) :
\[d_{wire} \leq \sqrt[4]{\frac{h\rho (d_{out}^2-d_{in}^2)I_0}{U_0}}\] and since we want to maximize \(NI= \frac{h(d_{out}-d_{in})}{2d_{wire}^2}\frac{U_0d_{wire}^4}{(d_{out}^2-d_{in}^2) h\rho} = \frac{U_0d_{wire}^2}{2\rho(d_{out}+d_{in})}\) , we want to maximize \(d_{wire}\).
Therefore, for a given geometry and amplifier, at DC current, it is optimal to have \[d_{wire} = \sqrt[4]{\frac{h\rho (d_{out}^2-d_{in}^2)I_0}{U_0}}\]. This approach is simply a form of impedance matching, between the amplifier and the magnetic field.
The cylindrical core
In low intensity fields, a ferromagnetic material can be considered linear (see table below), hence \(\overrightarrow{H}=\frac{1}{\mu_0\mu_r} \overrightarrow{B}\), and inside an infinite solenoid we get
\(B = \mu_r \frac{\mu_0 N}{l}I\) (ref cours Sornette)
Hence, the ferro-magnetic core passively amplifies the field generated by the coil. [^Energy is conserved, since the coil must provide additional power to rise to the amplitifed field : the inductance of the coil becomes \(L = \mu_r \frac{\mu_0 N^2S}{l}\).]
To maximize the field above the coil, we want to choose a material with a high \(\mu_r\) : One of the metal with the highest \(\mu_r\) is a special alloy called µ-metal, but it is very expensive as a bulk material, and it is usually used as a shielding sheet. Another attractive material is soft-ferrite, but ferrites tend to saturate at very small magnetic field intensities making them unsuitable for anything but small electro-magnets (or signal filtering). Finally, pure iron and some steels have a high \(\mu_r\) (though lower than that of ferrite at low \(B_0\)) and have a high magnetic saturation limit. Additionally, steels have reasonable thermal conductivities, making it easier to evacuate the heat generated by the surrounding coil.
Soft iron Ferrite (TDK PE22) MuMetal
B MuR B MuR B MuR
(tesla) (tesla) (tesla)
================== ================== ====================
0.0000 4075.4511 0.000 5704.912 0.0000 73398.5246
0.8944 3768.2831 0.077 5633.436 0.0722 73398.5246
1.2000 3166.8099 0.160 5424.336 0.1444 77009.7382
1.4000 2380.6469 0.254 4781.793 0.2527 74441.0260
1.5000 1595.4230 0.353 3578.099 0.3068 72787.8064
1.5500 997.8273 0.385 2578.026 0.3249 71206.0556
1.6000 674.1631 0.405 1499.123 0.3610 68146.5021
1.6500 473.5731 0.419 778.228 0.3790 63014.8312
1.7000 319.4254 0.439 347.272 0.4332 48685.4716
1.7500 221.3841 0.465 129.890 0.4693 38841.3551
1.8000 173.2094 0.487 47.974 0.5054 28360.2248
1.8500 139.9732 0.527 16.847 0.5415 17641.2071
1.9000 113.0668 0.599 6.883 0.5595 12919.5326
1.9500 90.6347 0.687 3.903 0.5775 9452.6909
2.0000 73.9636 0.815 2.640 0.6315 2244.9895
2.0500 60.9549 1.015 1.976 0.6489 807.5867
2.1000 51.1983 1.229 1.720 0.6624 178.6407
2.1250 44.2498 1.422 1.574 0.6693 66.6538
2.1500 38.2875 1.622 1.478 0.6825 29.9372
2.1750 32.4063 1.782 1.423 20.0000 1.0343
2.2000 25.9244 1.978 1.371
2.2500 19.6678 2.175 1.303
2.2797 15.2170 2.349 1.255
2.3069 12.3584 2.494 1.239 The above table sums up the relative permabilities of Soft iron, ferrite and µ-metal. Data from the Field Precision LLC website.
Therefore, most holding electro-magnets have a steel core, and an outer steel ring that also helps focusing the field.
Even with a simple geometry and simplifying assumptions like linear magnetic properties, the field generated by a thick finite solenoid wound around a steel core is difficult to get analytically. There is however extended litterature on the field generated by thick solenoid and permanent magnets : @@Walled1979 or @@Ravaud2010 detail complete formulae.
We used a free simulation program FEMM, commonly used in magnetostatics, to visualise the field.
Force on the string
Most guitar and piano strings are made in part of steel, which can be considered a magnetically linear material here. (see table above)
When exposed to an external magnetic field \(\overrightarrow{H_{ext}} = \frac{1}{\mu_0} \overrightarrow{B_{ext}}\), the string reacts with a field \(\overrightarrow{B_{string}}=\mu_0\mu_r \overrightarrow{H_{ext}}\) (inside the string).
The exact formula for \(\overrightarrow{B_{ext}}\) is complex and greatly depends on the geometry of the actuator and the materials used, but we can still use a semi-quantitative approach to get some results :
Since the string is small compared to the variations of \(\overrightarrow{B_{ext}}\), we will assume the magnetic moment is constant accross the section of the string. This magnetic moment per unit of length is simply \(\overrightarrow{m\,} (x,y) = S_{\text{string}} \mu_0 \mu_r \overrightarrow{H_{ext}}(x,y)\)
\(\overrightarrow{B_{ext}}\) is not uniform and its magnitude is stronger near the coil.
The force acting on a section of the string is
\(\overrightarrow{f(x,y, z)} = \overrightarrow{\nabla\,}(\overrightarrow{m\,} \dot{} \overrightarrow{B_{ext}}) = \overrightarrow{\nabla\,}( S_{\text{string}} \mu_r \overrightarrow{B_{ext}}\dot{} \overrightarrow{B_{ext}}) = \overrightarrow{\nabla\,}\left( S_{\text{string}} \mu_r \left|\left|\overrightarrow{B_{ext}}\right|\right|^2\right)\)
We are mostly interested in the projection of this force on the \(z\) axis (and to a lesser extent, on the \(y\) axis) in the axis of symetry of the cylinder.
Hence \(f_z (x_0,y_0, z) = S_{\text{string}} \mu_r \frac{\partial}{\partial z} \left( B_x^2 + B_y^2 +B_z^2 \right) = S_{\text{string}} \mu_r \frac{\partial}{\partial z} B_z^2 = S_{\text{string}} \mu_r \left(\frac{\partial}{\partial z}B_z\right) B_z\)
\(B_{ext}\) is directly proportional to the current in the coil, so \(f_z \propto I^2\).
They are different approaches to get a more linear response. McPherson uses a DC offset@^McPherson2012 so that \(f_z = \alpha (I_0 + I_{signal})^2 \approx \alpha( I_0^2 + 2I_0I_{signal})\). The offset is adaptative : an envelope detector sets \(I_0\) so that \(I_0 + I_{signal}\) is positive but not too high (to avoid overheating the coil).
Another approach used is to attach a permanent magnet to the electro-magnet assembly. This has the advantage of reducing the current injected (hence reduce the dissipated power), while also achieving intense fields, and it simplifies the amplifier circuit.
This approach is justified by the fact that the magnetic field created by the current running in the coil can be seen as a rotating surface current in the coil inner cylinder, and the same model describes permanent cylindrical magnets@^Ravaud2010. Since the steel core will canalises the magnetic field lines of the permanent magnet below it, we can expect the steel core to be magnetised like a permanent magnet (but with the added benefit of having a high \(\mu_r\)). FEMM Simulations proved this assumption to be reasonable for the typical fields used here : for the geometry of the electromagnet proposed by McPherson (see next paragraph), the fields above the electromagnet, generated either by injecting a current or adding a stack of neodymium magnets at the back, have a very similar decay profile.
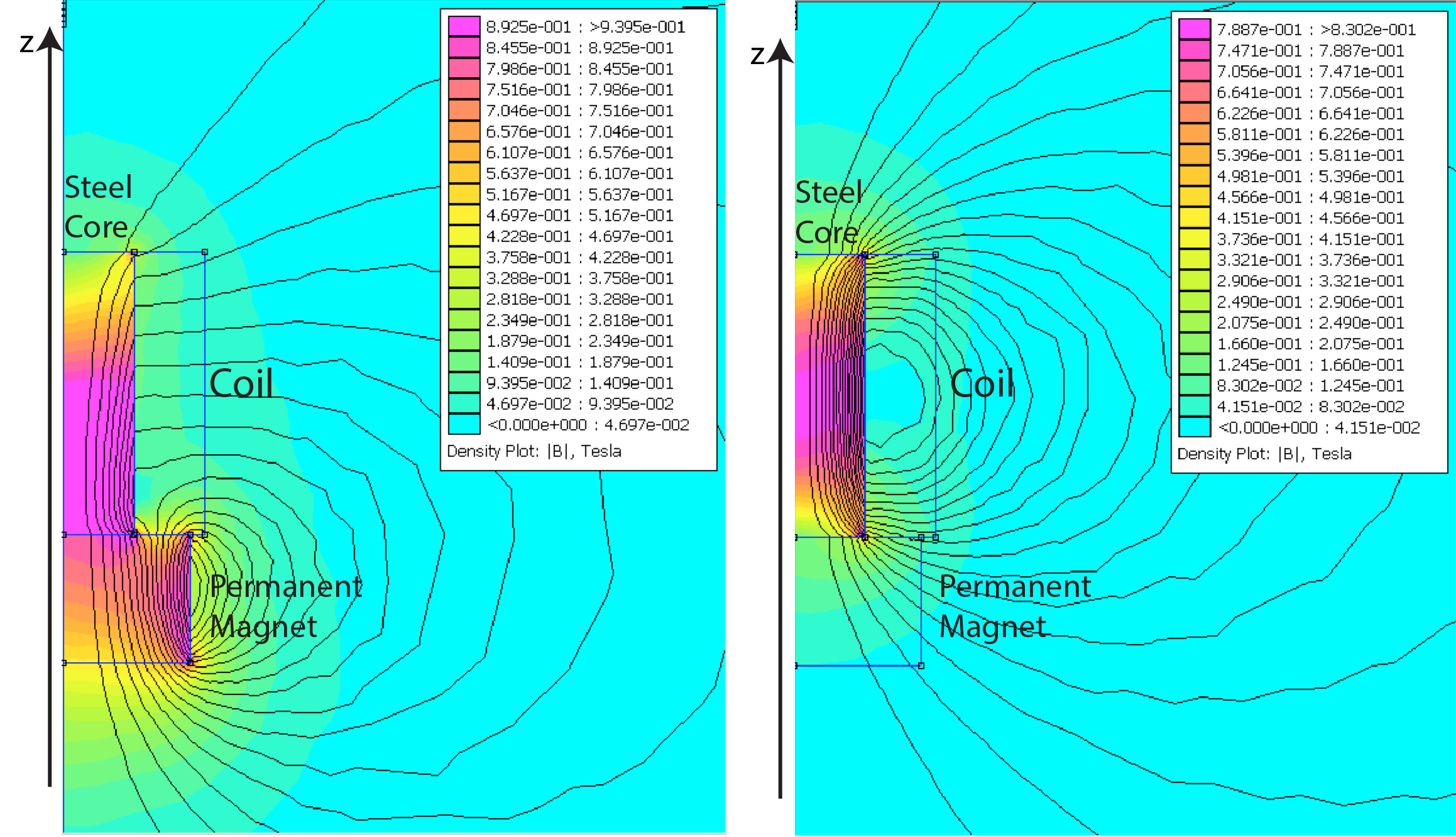
FEMM simulations for the E-77-88 with a permanent neodymium magnet at the back (left) and with current flowing through the coil (right)
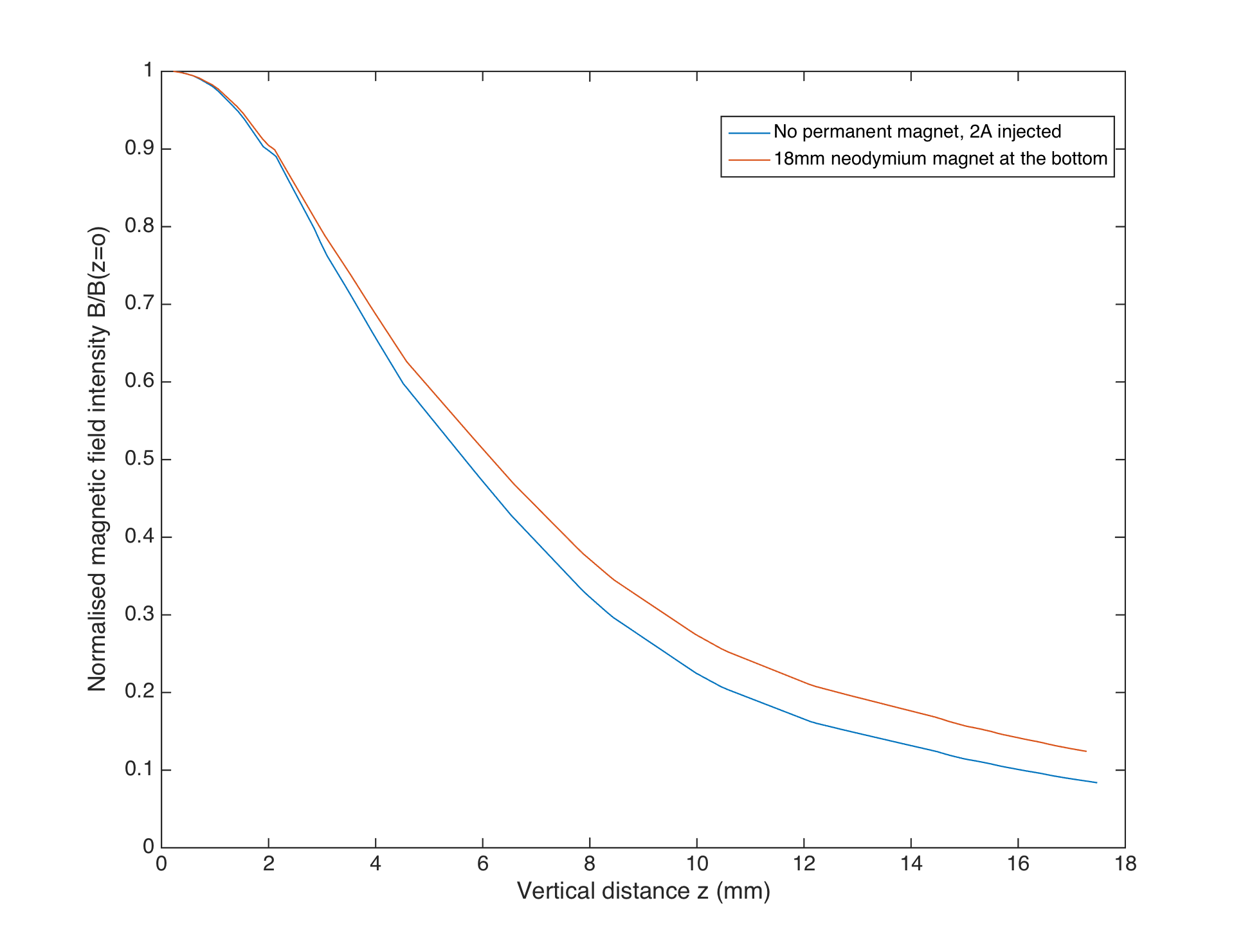
Normalized decay profiles of the fields shown in the above simulations
Hence we can expect the addition of permanent magnets at the back of the electromagnet to be similar to a DC current offset in the coil. This is the approach we used for this instrument : below the electromagnets are strong neodymium magnets that generate the necessary offset.
Sourcing the actuator
The MRP design uses a model of electromagnet that has become a reference among augmented instruments : the E-77-82 from ElectroMechanicsOnline.com. It is a cylinder with a diameter of 20.8mm and a height of 19.6mm, with a steel core (diameter 7mm) and a steel outer casing (thickness 0.5mm). It has a resistance of around \(5.5\Omega\) and an inductance of 19mH @^McPherson2012 , and approximately 1000 turns.
We added three 3mm thick neodymium magnets (grade N42, diameter 18mm) at the back, and quickly milled little wood pieces that would hold the magnet at a reasonable distance from the string (6mm). This distance was chosen after exciting the string with a sine at its resonance frequency, and changing the height to get a good amplitude of oscillation without having the string hitting the actuator.

The E-77-82 electromagnet with neodymium permanent magnets

The E-77-82 installed beneath the string with its custom support part
For the geometry of this electromagnet and an amplifier with \(I_0 = 1A\) and \(U_0 = 10V\), the optimisation of the diameter of the wire gives \(d_{wire} = 0.40 \text{mm}\) or in the American gauge system AWG26, which is close to the AWG28 that McPherson recommends . But since the expression uses a 4th-root, and since this optimisation neglects inductance, we mostly want the resistance to be in the range of \(4\Omega\) to \(15\Omega\), adapted to speaker amplifiers (typical expected impedance \(8\Omega\)).
These electromagnets being relatively expensive and made within a high DC resistance tolerance, we tried to find a more affordable alternative. We found that Wuxue Wen Fang Electric Co Ltd makes electromagnets with similar characteristics, at a much lower price. These magnets are sold on ebay.com through various Chinese sellers. They seem to always have "0.8A 5V" in their listed name, but will call them using the printed name WF-P25/20. They have an outside diameter of 25mm and a height of 20mm, a 10mm diameter steel core, and a typical resistance of \(7.0\Omega\).

The WF-P25/20 electromagnet
Note : A quantitative comparison between the two electromagnets can be found in the magnetic scanner results section.
Having now suitable actuators for the instrument, we can move on to the choice of the sensors.
- Introduction
- Landscape of augmented instruments
- Design choices for the instrument
- Engineering a magnetic scanner
- Controlling the instrument
- Discussion : Compairing with other setups
- Conclusion and future work
- About this website